优化器是用来更新参数的,其以梯度,lr,参数parameters以及其他值例如动量作为输入,经过一系列变换,得到新的参数。
而发展到如今,有很多的优化器,他们的不同之处就是这个变换的不同。
我们仔细想象,变换的不同,其实也可以认为是侧重点不同,不同的优化器有各自的特点和用武之地,他们考虑的因素有如下:
本文参考了以下文章,所以相当于是读书笔记:
1.https://zhuanlan.zhihu.com/p/77503211
1.批梯度下降 BGD (Batch gradient descent)
2.随机梯度下降 SGD (Stochastic gradient descent)

3.小批梯度下降 MBGD (Mini-batch gradient descent)

1,2,3分别是所有样本,单个样本,部分样本带入模型,得到损失,计算梯度,更新参数。
显然,我们通常用的都是3,其已经是标配了。比如Pytorch中的DataLoader里设置batch_size。
1的缺点在于需要将数据全部放在内存。2的缺点在于参数更新抖动比较大,因为前后两个样本可能有一定差距,前面往左更新,后面又往右边更新,不好。而方法3,取部分可以某种程度上代表整体,求平均的损失,求梯度,更新参数,更加稳定。
注:我们今后所讲的SGD都是指代上面的3,而不是2。这个S你可以理解为随机抽取部分样本代替总体样本分布的意思。
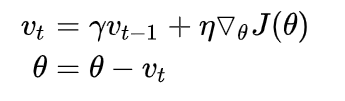
momentum是动量的意思,其意思是说保持上次参数更新的方向一定程度地不变。其优点是:
我们让
v
0
=
0
v_0=0
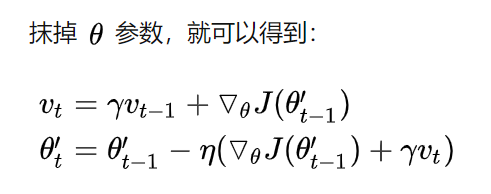
v0?=0即可一直迭代下去。其中前面那个希腊字母是momentum参数,后面那个是lr参数。
Nesterov是一个人。
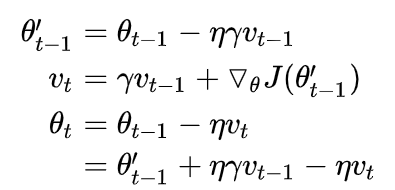
可以看到,上面的momentum可以分为两个步骤,先 θ ? γ v t ? 1 heta-\gamma v_{t-1} θ?γvt?1?,成为 θ ′ heta^{'} θ′,然后再减去关于之前的 θ heta θ的梯度。
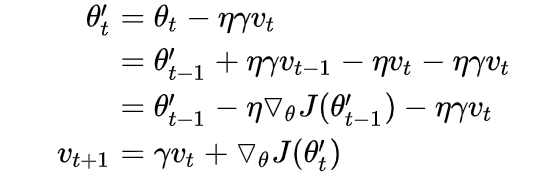
现在Nesterov换一种方法,其第二步换成减去关于现在 θ ′ heta^{'} θ′的梯度。
使用方法
pytorch中的集成了momentum和Nesterov的SGD实现方式如下,和之前讲的略有不同,但功能差不多。
下面是实现了momentum的SGD。
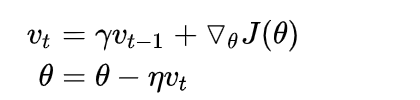
相当于两个超参数的乘积才是momentum这个超参数了,其他一样。所以lr参数变得更加重要,因为其会直接影响两个嘛。
下面是实现了Nestero的SGD。
上面很容易,所有步骤都写齐了,仔细看看就可以。
是L2正则,目的是防止过拟合。例如下图就过拟合了。

我们发现:过拟合有一个特点:那就是导数很大。
所以我们的想法就是:不让其导数很大,从而希望减轻过拟合。那怎么让其导数不要很大呢?你看上面那个函数,大概是这样的: a x 5 + b x 4 + c x 3 + d x ax^5+bx^4+cx^3+dx ax5+bx4+cx3+dx,其中 a , b , c , d a,b,c,d a,b,c,d是我们要学的参数。其导数为: 5 a x 4 + 4 b x 3 + 3 c x 2 + d 5ax^4+4bx^3+3cx^2+d 5ax4+4bx3+3cx2+d,我们希望导数不要很大,那么当然可以让 a , b , c , d a,b,c,d a,b,c,d小一些喽,因为参数是我们可以控制的, x x x是输入,我们无法控制。 a , b , c , d a,b,c,d a,b,c,d更小,从而我们可以在损失函数上加上一项 l o s s w = 1 4 ? 1 2 ( a 2 + b 2 + c 2 + d 2 ) loss_w=\frac{1}{4}*\frac{1}{2}(a^2+b^2+c^2+d^2) lossw?=41??21?(a2+b2+c2+d2),这个东西就叫做L2正则项(平方)。前面的那个1/4是4个参数取平均,后面那个1/2是为了这一项loss对参数 a a a等求偏导之后系数为1。
那么我们得到了完整的loss,
l
o
s
s
=
l
o
s
s
x
+
l
o
s
s
w
loss=loss_x+loss_w
loss=lossx?+lossw?,在实际中,我们会对这两项做一个平衡,即:
l
o
s
s
=
l
o
s
s
x
+
λ
l
o
s
s
w
loss=loss_x+\lambda loss_w
loss=lossx?+λlossw?
其中 λ \lambda λ 就称为权重衰减系数。显然,这个数越大,那么优化之后,权重就会越小,否则损失太大。



